


工業級 · 六維力傳感器PhotonR56P
PhotonR56P是一款針對超輕量型仿人機械臂開發的工業級 · 六維力傳感器,該傳感器內置高精度嵌入式信號處理電路,同時大小及重量適中,可靠耐用,可與市面上常見的超輕量型仿人機械臂無縫適配,可廣泛應用于新零售,新餐飲,生活服務,商業服務,智慧家居等應用場景。
所屬分類:
力及力矩傳感器
靜態力/力矩傳感器
關鍵詞:
工業級 · 六維力傳感器PhotonR56P
產品咨詢
- 產品描述
- 產品功能特點
- 產品的技術參數
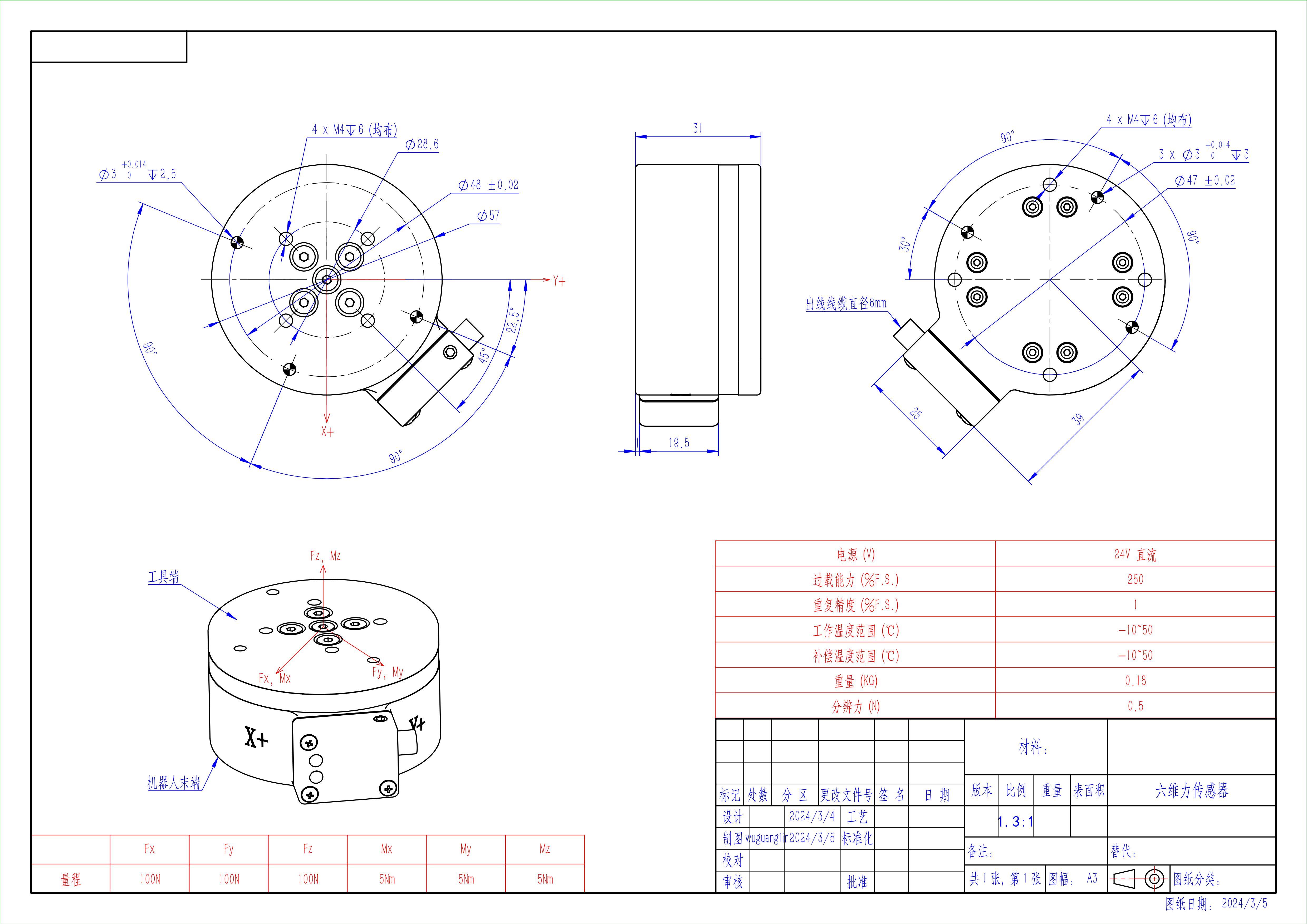
- 產品的結構圖
- 示例代碼
-
PhotonR56P是一款針對超輕量型仿人機械臂開發的工業級 · 六維力傳感器,該傳感器內置高精度嵌入式信號處理電路,同時大小及重量適中,可靠耐用,可與市面上常見的超輕量型仿人機械臂無縫適配,可廣泛應用于新零售,新餐飲,生活服務,商業服務,智慧家居等應用場景。
-
1.針對超輕量型仿人機械臂開發的六維力傳感器
2.傳感器內置高精度嵌入式信號處理電路
3.大小及重量適中,可靠耐用,可與市面上常見的超輕量型仿人機械臂無縫適配 -
技術參數 / Technical Parameters 量程 / Range
Fz=Fx=Fy : 100N
Mz=Mx=My : 5Nm過載 / Overload
250%F.S
重復精度 / Repeatability
0.5%F.S
分辨力 / Resolution
0.1%F.S
零漂 / Zero Drift
0.5%F.S
防護等級 / Protection Rating
IP64
供電電壓 / Supply Voltage
DC 24V
溫度補償 / Temperature Compensation
-10℃ ~50℃
工作溫度 / Operating Temperature
-10℃ ~50℃
輸出信號 / Output Signal
CANFD/RS485/
工業以太網等采樣頻率 / Sampling Frequency
1000Hz
-
-
#include "sensor_connector/sensor_connector.h"
#ifdef _WIN32
#include <windows.h>
#define imsleep(microsecond) Sleep(microsecond) // ms
#else
#include <unistd.h>
#define imsleep(microsecond) usleep(1000 * microsecond) // ms
#endif
int main(int argc, const char** argv)
{
haptron::ConnectorConfig sc;
sc.sensor_type = haptron::SensorType::Photon_56P;
sc.com_pro = haptron::CommucationProtocol::Serial;
sc.port = std::string("/dev/ttyUSB0");
haptron::SensorConnector sensor_connector(sc);
float fx, fy, fz, tx, ty, tz = 0.0;
bool ret = sensor_connector.connect();
if(!ret){
return -1;
}
while (true)
{
sensor_connector.get_data(fx, fy, fz, tx, ty, tz);
printf("Sensor data: %6.4f, %6.4f, %6.4f, %6.4f, %6.4f, %6.4f.\n", fx, fy, fz, tx, ty, tz);
imsleep(10);
}
sensor_connector.close();
return 0;
}
相關產品

了解詳情 >
了解詳情 >
了解詳情 >
了解詳情 >
了解詳情 >
了解詳情 >
產品咨詢
